हेडलाइट सुधारकर्ता के हो: प्रकार, सञ्चालनको सिद्धान्त र खराबीहरू
सामग्रीहरू
यदि उच्च बीम हेडलाइटहरू, हेड लाइटिंग, म्यानुअल रूपमा वा स्वचालित रूपमा, कम बीम मोडमा स्विच गर्नुहोस्। तर यो पर्याप्त छैन, हेडलाइटहरू सही रूपमा समायोजन भए तापनि, तिनीहरूको स्थिति एक विशेष परिस्थितिको सम्बन्धमा सडक सापेक्ष समायोजित हुनुपर्छ। त्यहाँ यसको लागि दुबै कारणहरू छन्, र गाडीको बाहिरी प्रकाश प्रणालीको भागको रूपमा सम्बन्धित उपकरणहरू।

तपाईलाई हेडलाइट सुधारकर्ता किन चाहिन्छ
कम किरण र उच्च बीम बीचको भिन्नता हेडलाइटमा निर्मित स्क्रिनबाट प्रकाशित क्षेत्र र छायाँ बीचको स्पष्ट ठाडो सीमाको उपस्थिति हो।
स्क्रिनको भूमिका विभिन्न अप्टिकल योजनाहरू र सिद्धान्तहरू द्वारा प्रदर्शन गर्न सकिन्छ, तर मुद्दाको सार यसबाट परिवर्तन हुँदैन - यस मोडमा हेडलाइटहरू आगामी ड्राइभरहरूको आँखामा पर्नु हुँदैन। यसले सडकको उज्यालो कम गर्छ, तर तपाईंले सुरक्षाको पक्षमा दक्षता त्याग गर्नुपर्छ।

कट-अफ लाइनको स्थिति कार शरीर सापेक्ष हेडलाइट को झुकाव को कोण द्वारा सेट गरिएको छ। सर्भिस स्टेसनमा मार्क्स वा अप्टिकल स्ट्यान्डको साथ स्क्रिनमा बाहिरी प्रकाश समायोजन गर्दा यो सेट गरिन्छ।
समायोजन को सुरक्षा प्राविधिक निरीक्षण को समयमा नियन्त्रण गरिन्छ। उच्च-बिम हेडलाइटहरूले सर्चलाइटहरू जस्तै काम गर्दछ र स्थान र किरणको प्रकाश शक्तिमा कुनै विशेष प्रतिबन्धहरू छैनन्। यद्यपि तिनीहरूले सडक उज्यालो गर्नुपर्छ, उपग्रह कक्षहरू होइन।
तर हेडलाइट हाउसिंग, रिफ्लेक्टर र शरीरको सापेक्ष लाइट बीमको ज्यामिति सीमित गर्न उपकरणको सही स्थिति सुनिश्चित गरिसकेपछि, सडकको सापेक्ष सीमा सुरक्षाको ग्यारेन्टी गर्न असम्भव छ। तर यो वास्तवमा के महत्त्वपूर्ण छ, आगामी ड्राइभरहरूको आँखाको स्थिति यसको प्रोफाइलमा बाँधिएको छ।
यसैबीच, तेर्सो विमानसँग सम्बन्धित गाडीको कोण सफ्ट सस्पेन्सनको कारण स्थिर हुन सक्दैन।
यदि तपाइँ कारको पछाडि लोड गर्नुहुन्छ, जहाँ अतिरिक्त यात्रुहरू र सामानको डिब्बा प्रायः अवस्थित हुन्छ, त्यसपछि शरीरले प्राप्त गर्नेछ, उड्डयन सर्तहरूमा, पिचिङको लागि पिच कोण, यो फिर्ता हुनेछ, र हेडलाइटहरू सुरु हुनेछ। आकाशमा चम्कन।

सबै राम्रो समायोजन असफल हुनेछ, आउँदै गरेको कारहरू अन्धा हुनेछन्, जसले तीखो कट-अफ लाइनको साथ राम्रोसँग सोचेको बीम गठन डिजाइनलाई अस्वीकार गर्नेछ। यो समायोजन परिवर्तन गर्न आवश्यक छ, तर कार को हरेक चर लोडिंग वा अनलोडिंग संग यो गर्न को लागी छैन। नतिजाको रूपमा, डिजाइनमा हेडलाइट सुधारक भनिने यन्त्र पेश गरिएको थियो।
कहाँ छ
सुधारको लागि, हेडलाइट हाउसिङमा अप्टिकल तत्वको झुकाव प्रयोग गरिन्छ। पछाडि छेउमा सम्बन्धित लीभर सुधारकर्ता एक्चुएटर द्वारा सक्रिय हुन्छ, जुन सञ्चालनको सिद्धान्त अनुसार सबैभन्दा विविध प्रकारको हुन सक्छ।

कसरी यो काम गर्दछ
म्यानुअल सुधारको साथ, चालकले केबिनमा नियामकको स्थिति सजिलै वा धेरै निश्चित स्थानहरू मध्ये एकमा परिवर्तन गर्दछ।
मेकानिकल, बिजुली वा हाइड्रोलिक जडान मार्फत, आन्दोलन अप्टिकल तत्वमा प्रसारित हुन्छ। ड्राइभरले सडकमा प्रकाश किरणको स्थिति कसरी परिवर्तन हुन्छ देख्छ, र दूरीमा उत्कृष्ट दृश्यताको साथ स्थिति चयन गर्दछ, तर अन्धा पार्ने प्रभाव बिना।

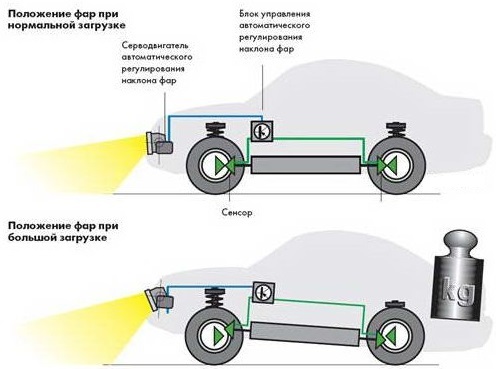
स्वचालित सुधारले स्वतन्त्र रूपमा शरीरको झुकावको कोणमा परिवर्तनहरू ट्र्याक गर्न सक्षम छ, सडकको सापेक्ष प्रकाश बीमको स्थिति कायम राख्दै।
यसले चालकलाई म्यानुअल काम र सम्बन्धित स्थान स्थिति त्रुटिहरू र बिर्सनेपनबाट बचाउँछ। सुरक्षा उल्लेखनीय रूपमा बढ्छ। निस्सन्देह, एक गम्भीर दुर्घटनामा पर्न, अन्धा पार्ने एक असफल मामला पर्याप्त छ।
हेडलाइट सहरका प्रकारहरू
सुधारकर्ताहरूको विविधता प्रविधिको प्रभावकारिता र यसको लागत बीचको ट्रेड-अफको अनन्त विषयवस्तुको कारणले हुन्छ।

मकोनिकल
सबैभन्दा सरल समाधान भनेको हुड मुनिबाट सजिलो पहुँचको साथ हेडलाइटमा समायोजन स्क्रू हुनु हो।
ड्राइभरले कार किन्दा धेरै बचत गर्नेछ, तर प्रत्येक लोड परिवर्तनको साथ हुड खोल्न र म्यानुअल रूपमा कम बीमको कट-अफ लाइन सेट गर्न बाध्य हुनेछ। धेरै प्रयासहरू प्रयोग गरेर वा विशेष रूपमा चिन्ह लगाइएको स्क्रिन प्रयोग गरेर।

वायवीय
वायमेटिक ड्राइभले हुड खोल्ने आवश्यकतालाई हटाउँछ, नियामक ड्यासबोर्डमा राखिएको छ, र हेडलाइटमा बल एयर लाइन मार्फत प्रसारित हुन्छ।
सामान्यतया एक भ्याकुम इन्जिन को इनटेक मेनिफोल्ड मा प्रयोग गरिन्छ। धेरै विरलै हुन्छ।

हाइड्रोलिक
हाइड्रोलिक ड्राइभ सुविधाजनक छ, यो ब्रेक, क्लच नियन्त्रण र अन्य धेरै केसहरूमा प्रयोग गरिन्छ। यसले यात्रु डिब्बाको समायोजन ह्यान्डलबाट हेडलाइट नजिकको दास सिलिन्डरमा बल स्थानान्तरण गर्न कम प्रभावकारी रूपमा काम गर्दैन।

निस्सन्देह, यहाँ प्रणाली धेरै सरल र सस्तो छ, किनकि दबाव सानो छ, प्लास्टिक भागहरू र सस्तो सिलिकन तरल पदार्थ प्रयोग गरिन्छ।
इलेक्ट्रोमेकानिकल
इलेक्ट्रिक समायोजनले तपाईंलाई तरल पदार्थ वा वायमेटिक एक्ट्युएटरहरूबाट छुटकारा पाउन अनुमति दिन्छ। ह्यान्डल सार्दा हेडलाइटमा सुधारकर्ता सर्वो ड्राइभबाट सिंक्रोनस काम हुन्छ।
सर्किटरीमा, यो गाह्रो हुन सक्छ, तर ठूलो उत्पादनमा यो केबल वा हाइड्रोलिक ड्राइभको साथ मेकानिक्स भन्दा सस्तो छ। थप रूपमा, त्यस्ता नोडहरूले हल्का सिमानाको स्वचालित मर्मत कार्यान्वयन गर्न सजिलो बनाउँदछ।

इलेक्ट्रोमेकानिकल ड्राइभको साथ स्वचालित सुधारकर्ताहरूले निलम्बनमा सेन्सरहरू समावेश गर्दछ जसले यसको लिभरहरूको स्थिति मापन गर्दछ।
डाटा, सामान्यतया एक चर प्रतिरोध को रूप मा, इलेक्ट्रोनिक एकाई मा प्रसारित छ, जो पूर्व निर्धारित र वर्तमान स्थिति बीच परिणाम बेमेल बाहिर काम गर्दछ।
हेडलाइटहरू जहिले पनि सडकमा बम्पहरू माथि ड्राइभ गर्दा पनि तिनीहरूले कहाँ गर्नुपर्छ भनेर हेर्नुहुन्छ। अर्को चरण केवल प्रकाश म्याट्रिक्स संग विशुद्ध इलेक्ट्रो-अप्टिकल नियन्त्रण हुनेछ जसले आउँदै गरेको चालकको आँखाको रोशनीलाई रोक्छ।
विशिष्ट गल्तीहरू
हाइड्रोलिक सिद्धान्त अनुसार म्यानुअल समायोजन प्रणालीहरू, विशेष गरी मेकानिकल स्क्रूहरू, धेरै भरपर्दो छन्, त्यहाँ तोड्न केहि छैन। एक हाइड्रोलिक विफलता को घटना मा, विधानसभा एक सेट को रूप मा बदलिएको छ।
इलेक्ट्रोमेकानिकल सुधारकर्ताहरू अधिक आधुनिक र कम भरपर्दो छन्। थप स्पष्ट रूपमा, सैद्धान्तिक रूपमा तिनीहरू व्यावहारिक रूपमा अनन्त बनाउन सकिन्छ, तर निर्माताहरूले सधैं बचत गर्छन्।
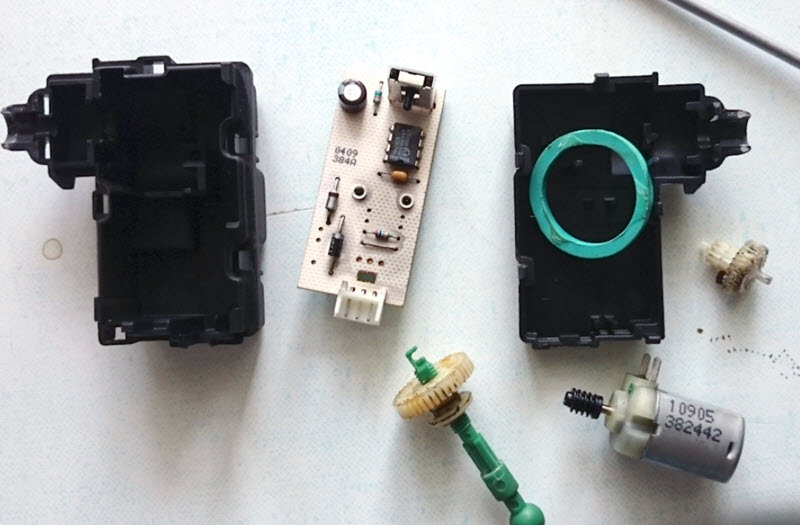
नतिजाको रूपमा, पोटेन्टियोमेट्रिक सेन्सरहरू, सर्वो कलेक्टरहरू र गियरबक्सहरूको प्लास्टिक गियरहरू असफल हुन्छन् (वाइप)।
प्रतिस्थापन व्यक्तिगत नोड्स को लागी गरिन्छ, यी सेन्सर, actuators, प्लास्टिक रडहरु छन्। इलेक्ट्रोनिक सर्किटहरू मात्र असफल हुन सक्छ यदि नमी भित्र पस्छ र तारहरूमा सम्पर्कहरू कोर्रोड गर्दछ।
समायोजन र मर्मत
व्यक्तिगत कम्पोनेन्टहरू प्रतिस्थापन गरेर मर्मत पछि, सुधारकर्तालाई समायोजन आवश्यक पर्दछ, त्यो हो, नाममात्र रोशनी सीमा सेट गर्दै।
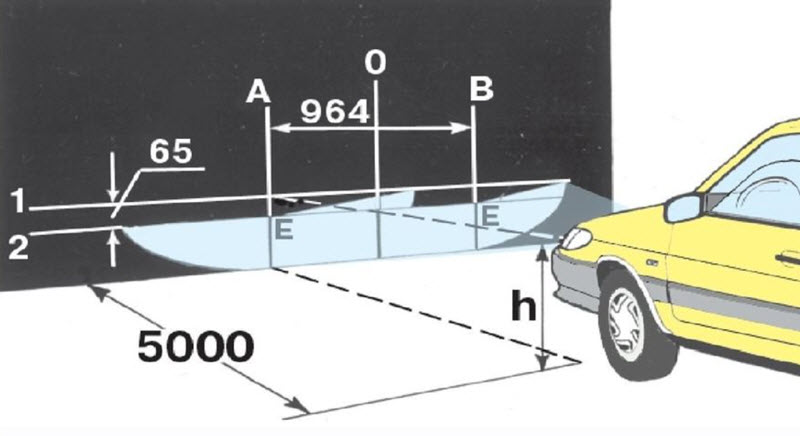
यसको लागि, एक चिन्हित स्क्रिन प्रयोग गरिन्छ, एक विशेष कार मोडेल को मरम्मत कागजात मा निर्दिष्ट दूरी मा सेट।
हेडलाइटहरू नियामकको तटस्थ स्थितिमा प्रकाश किरणको कोण अनुसार सेट गरिएको छ, त्यसपछि यो जाँच गरिन्छ कि यसले सीमानाको माथि र तलको आन्दोलनलाई काम गर्दछ।

निलम्बनमा स्वचालित सेन्सरहरूको स्थिति स्क्यानरको पढाइद्वारा नियन्त्रित हुन्छ, जसले तिनीहरूद्वारा पठाइएको जानकारीलाई निश्चित परीक्षण लोडमा नियन्त्रण इकाईमा पठाउँदछ, त्यो हो, निलम्बन हतियारहरूको स्थिति।
थप जटिल अवस्थाहरूमा, सेन्सरबाट सडकको दूरी नियन्त्रण गरिन्छ, जसलाई स्थापना विधि पनि आवश्यक पर्दछ। एक सफल परिणाम शून्य देखि अधिकतम वाहन लोड देखि प्रकाश सीमा को स्थिति को स्वतन्त्रता मान्न सकिन्छ।