4 नियन्त्रण
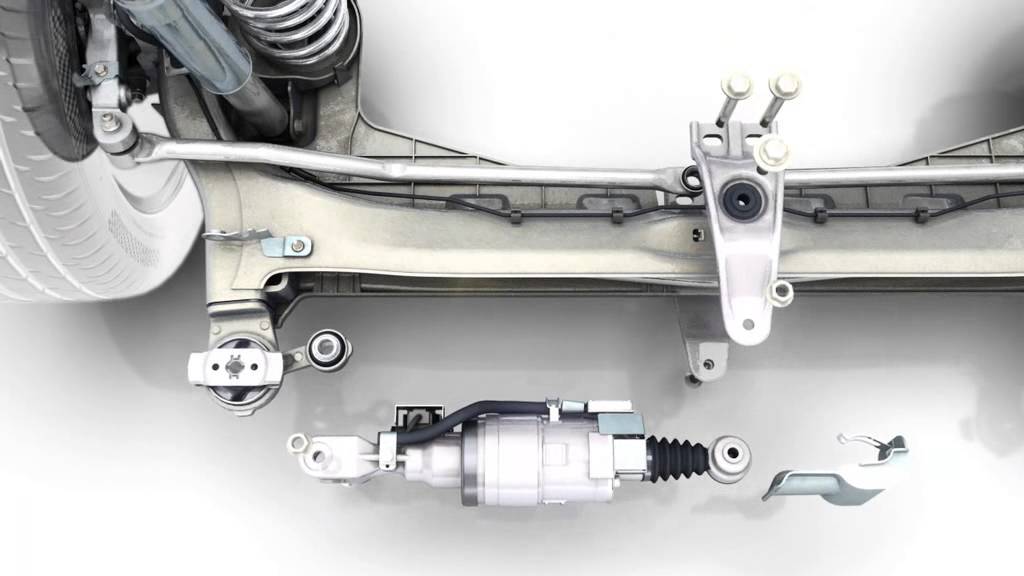
रेनोले विकास गरेको फोर-ह्वील स्टेयरिङ प्रणाली पूर्णतया इलेक्ट्रोनिक गाडीको डाइनामिक्स कन्ट्रोल (ABS, ESP, आदि) मा आधारित छ।
60 किमी/घन्टा भन्दा कम गतिमा, पछाडिको पाङ्ग्राहरू अगाडिको रेलको विपरित दिशामा स्टेयर हुन्छन्, घुमाउने त्रिज्या घटाउँदै र घुमाउरो सडकहरूमा ह्यान्डलिङ सुधार गर्न मद्दत गर्दछ।
जब यो गति नाघेको छ, पछाडिका पाङ्ग्राहरू अगाडिका पाङ्ग्राहरू जस्तै दिशामा स्टेयर हुन्छन्, जसले एकदमै सटीक प्रक्षेपण प्रदान गर्दछ र रोल घटाउँछ।

